





OAK-D-W-PoE
OAK-D-W-PoE
OAK-D-W-PoE是OAK-D-S2-PoE的变体,有更宽的视野(DFOV是150°)。产品测试详情>>
其子型号OAK-D-W-PoE 97, 拥有三目150°DFOV 全局快门,因此可以完成150°DFOV的RGBD成像,是目前拥有最大FOV且能完全同样FOV 深度对齐的相机之一。
Description
产品介绍
OAK是OpenCV官方指定的深度视觉+人工智能开发套件。了解更多>>
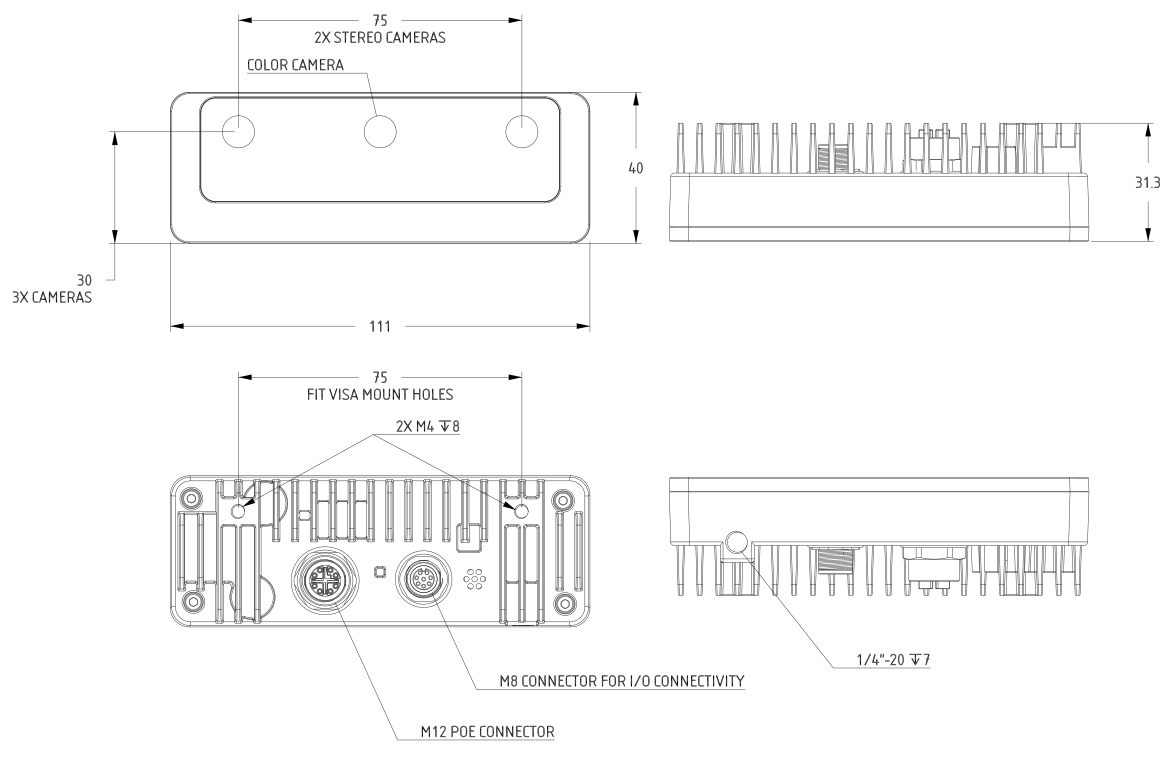
OAK-D-W-PoE结合了深度感知,目标检测(神经推理)和目标跟踪,并以简单易用的Python API来帮助您实现这些功能。包括三个机载摄像头(一颗4k/30fps彩色摄像头,两颗黑白双目摄像头)和IMU。IP5工业级防水,可用在室内室外。 并且扩展有POE接口(802.3af网络电源供电,以及千兆以太网),是一个带深度视觉的智能网络IP相机。
应用场景
- 工业智能化/自动化
- 机器人、无人机
- 安防监控
- 智能驾驶
- 医疗大健康
- 编程教育







包装内容
- 一台OAK-D-W-PoE相机
- 一根2米M12网线
技术参数
镜头参数
| 参数 | RGB相机 | RGB相机(全局快门款) | 双目相机 |
|---|---|---|---|
| 图像传感器(Sensor) | IMX378 | OV9782 | OV9282 |
| DFOV / HFOV / VFOV | 120°D / 95°H / 74°V | 150°D / 127°H / 79.5°V | 150°D / 127°H / 79.5°V |
| 分辨率 | 12MP (4032×3040) | 1MP (1280×800) | 1MP (1280×800) |
| 最大帧率 | 60 FPS | 120 FPS | 255 FPS |
| 焦距(EFL) | 4.81mm | 2.35mm | 2.35mm |
| 光圈(F.NO) | 2.8 ± 5% | 2.0 ± 5% | 2.0 ± 5% |
| 光谱范围 | 可见光 + 940nm | 可见光 + 940nm | 可见光 + 940nm |
| 对焦范围 | FF:60cm – ∞ | FF:18cm – ∞ | FF:18cm – ∞ |
| 镜头尺寸 | 1/2.3” | 1/4” | 1/4” |
| 像素大小 | 1.55µm x 1.55µm | 3µm x3µm | 3µm x3µm |
| 快门 | 卷帘快门 | 全局快门 | 全局快门 |
产品特点
- 150°广角,视野更宽,可实现150°DFOV的RGBD深度对齐
- 1200万高像素RGB摄像头/100万像素120FPS 全局快门RGB摄像头
- 全局快门双目深度摄像头
- 千兆以太网 、48V POE供电(M12)
- IP65工业级防水(未来批次会做到IP67)
- BNO086 IMU
深度感知
- 双目深度传感器基线:7.5厘米(即左右相机之间的距离)。最小和最大的深度感知取决于相机的FOV、分辨率和基线,更多信息请查看这里。
- 推荐测距范围:0.4~6m。最小深度:~20cm(400P或800P,扩展),~37cm(800P)。
其他参数
文档资料
使用文档
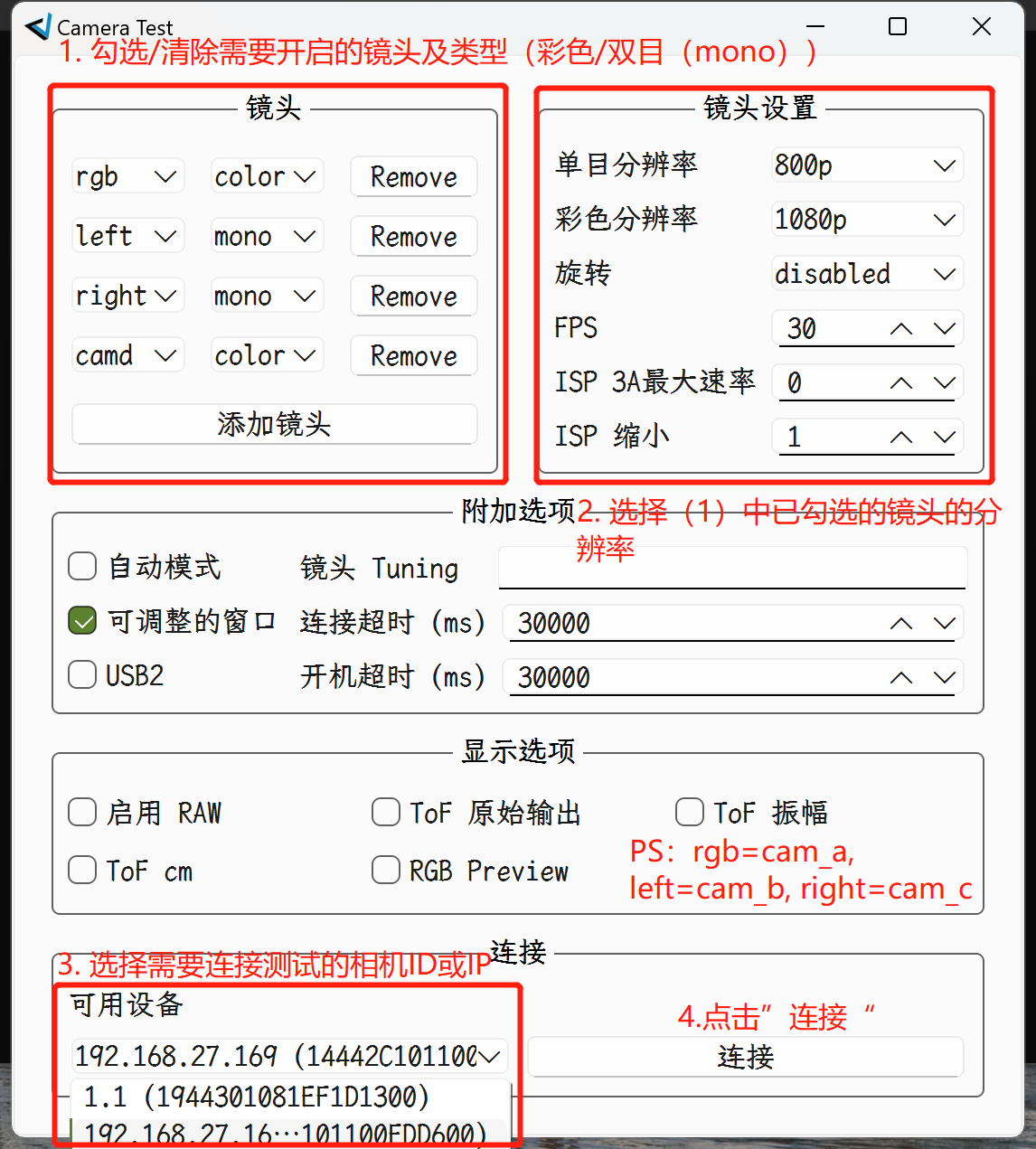
CAM_TEST硬件检测小程序
获取地址:CAM_TEST.EXE
支持型号:所有机型(除ToF外)
使用说明:
- 选择相机镜头(支持多个同时启动)和镜头属性(mono一般指代双目)
- 为所选的镜头设定分辨率
- 检查所选的相机IP或ID
- 点击“连接”
示例项目参考




{kind=link}
{kind=link}