




OAK-D-SR-PoE
OAK-D-SR-PoE
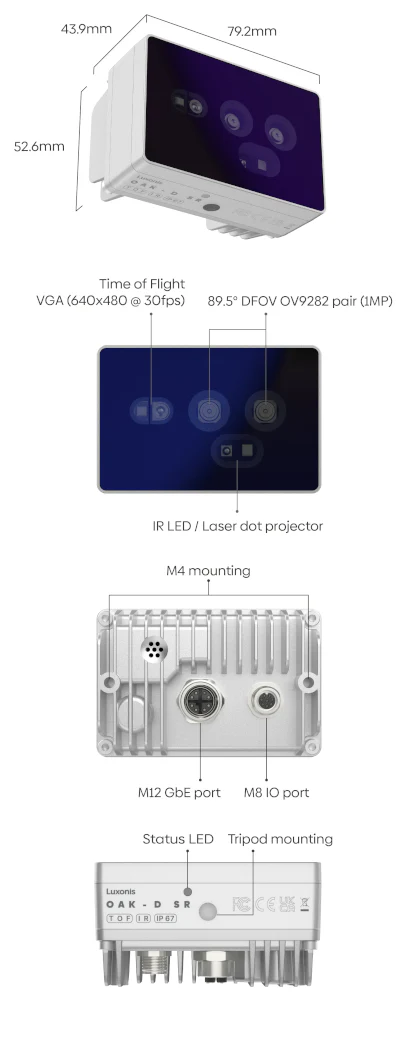
OAK-D-SR-PoE (Short Range)是OAK最新推出的一款高精度、高性能、多功能3D + AI深度相机,搭配了双目、结构光、ToF三合一的测距模式,在短距恶劣环境条件下拥有非常出色和稳定的性能表现;
拥有IP67级工业防护外壳设计、千兆网络接口,在边缘AI方面,RVC2拥有16nm制程板载AI芯片,可支持多种主流神经网络框架以及每秒高达9160亿次高性能边缘神经网络推理运算。相比于上一代产品,OAK-D-SR-PoE 在测距精度、深度数据质量和点云成像等方面有了极大优化与提升。
Description
技术参数
镜头参数
| 参数 | 双目相机 | ToF相机 |
|---|---|---|
| 图像传感器(Sensor) | OV9782 | 33D ToF |
| DFOV / HFOV / VFOV | 89.5°D / 80°H/ 55 °V | 82.3°D /70°H/ 54.7°V |
| 分辨率 | 1MP (1280×800) | VGA (640×480) |
| 最大帧率 | 120 FPS | 45 FPS (VGA) |
| 焦距(EFL) | 2.35mm | N/A |
| 光圈(F.NO) | 2.0 ±5% | 1.45 ± 5% |
| 对焦范围 | FF:20cm – ∞ | 20cm – 6m |
| 镜头尺寸 | 1/4” | 1/3.2” |
| 像素大小 | 3µm x 3µm | 7µm x7µm |
| 快门 | 全局快门 | N/A |
产品特点
- 双目、结构光、ToF三合一的测距模式
- 双目标配全局快门,彩色OV9782深度镜头
- 4T算力(1.4T用于AI)
- 千兆以太网 POE供电(M12和M8)
- IP67工业级防水
- BNO086 IMU
- 红外镭射激光
- 主动立体深度(无光深度)
- 夜间模式
- 主动照明(带IR,无光计算机视觉)
深度感知
立体深度
- 双目深度传感器基线:2厘米(即左右相机之间的距离)。最小和最大的深度感知取决于相机的FOV、分辨率和基线,更多信息请查看这里。
- 测距范围:0.2~6m。最小深度:~20cm(400P或800P,扩展),~37cm(800P)
- 理想范围:30cm – 100cm
• 最小:20厘米(800P)
• 最大:约 3 米,方差为 10%
TOF深度
- ToF 技术发射调制红外光 (940nm),测量返回传感器的时间,并计算物体距离。
- 深度范围限制:20厘米 – 5米
深度精度*:室内低于1%,室外低于2%;(*绝对精度)
其他参数
- 接口:PoE
- 功耗:3W~3.5W
- 尺寸:79.2×52.6×43.9mm
- 重量:297g
- 工作温度:-20° C ~ 50° C
开源示例下载
- 【官方】获取项目:RGB+ToF 对齐
- 【官方】获取项目:双目深度+Yolo AI识别
- 【官方】获取项目:ToF深度+Yolo AI 识别 (.exe客户端)
- 【官方】获取项目:ToF深度+Yolo AI识别
- 【官方】获取项目:开箱+ToF点云
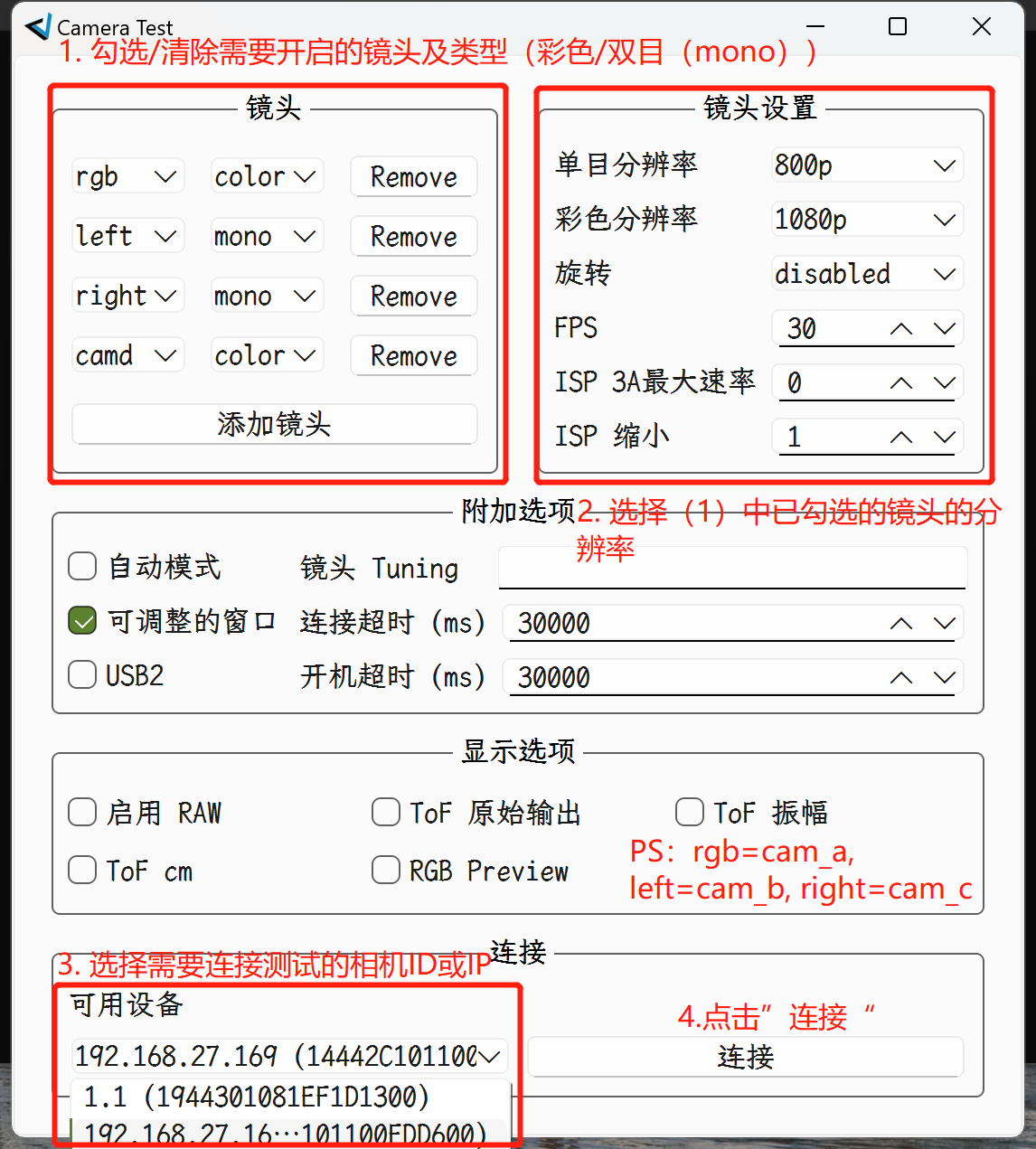
CAM_TEST硬件检测小程序
获取地址:CAM_TEST.EXE
支持型号:所有机型(除ToF外)
使用说明:
- 选择相机镜头(支持多个同时启动)和镜头属性(mono一般指代双目)
- 为所选的镜头设定分辨率
- 检查所选的相机IP或ID
- 点击“连接”




{kind=link}