





OAK-D-CM4-PoE
OAK-D-CM4-PoE
OAK-D-CM4-PoE是OAK-D-CM4的PoE版本,因为PoE同时用于供电和通信(用于树莓派CM4),另外,它的外壳是IP67等级的,外壳的大小与OAK-D-PoE一样。彩色摄像头靠近右边的摄像头,所以在大多数情况下不需要进行RGB深度对准,这就减少了系统负荷。
PS:需要此款产品的用户请在淘宝预订,预计3~5周内发货。
描述
产品介绍
OAK是OpenCV官方指定的深度视觉+人工智能开发套件。了解更多>>
OAK-D-CM4-PoE结合了OAK-D和作为主机的Raspberry Pi CM4模块,它旨在为开发者提供一个创建高级计算机视觉应用的平台。
产品特点
- 内置树莓派CM4主控,可独立运行
- IP67工业级防水,适用于室内室外场景
- 4GB DDR内存+8GB eMMC闪存
- 1200万高像素RGB摄像头
- 全局快门双目深度摄像头
- BNO086 IMU(查看参数)
- 2.5W平均功耗
- 1.4T的AI算力
- 4K H.265推流
- 厘米级测量精度
- H264、h.265、mjpeg- 4k/30fps, 1080p/60fps编码。
- 计算机视觉:通过ImageManip节点进行翘曲/扭曲、调整大小、裁剪、边缘检测、特征跟踪。你也可以运行自定义的CV功能。
- 立体深度感知:具有过滤、后处理、RGB-深度对齐和高可配置性。
- 物体追踪:通过ObjectTracker节点进行2D和3D追踪。
- 低功耗高算力的人工智能推理加速,兼容几乎所有主流神经网络边缘端加速。
- OpenCV开源图像算法加速功能,支持多种高分辨率,高FPS视觉传感器接入,支持多传感器数据并行处理。
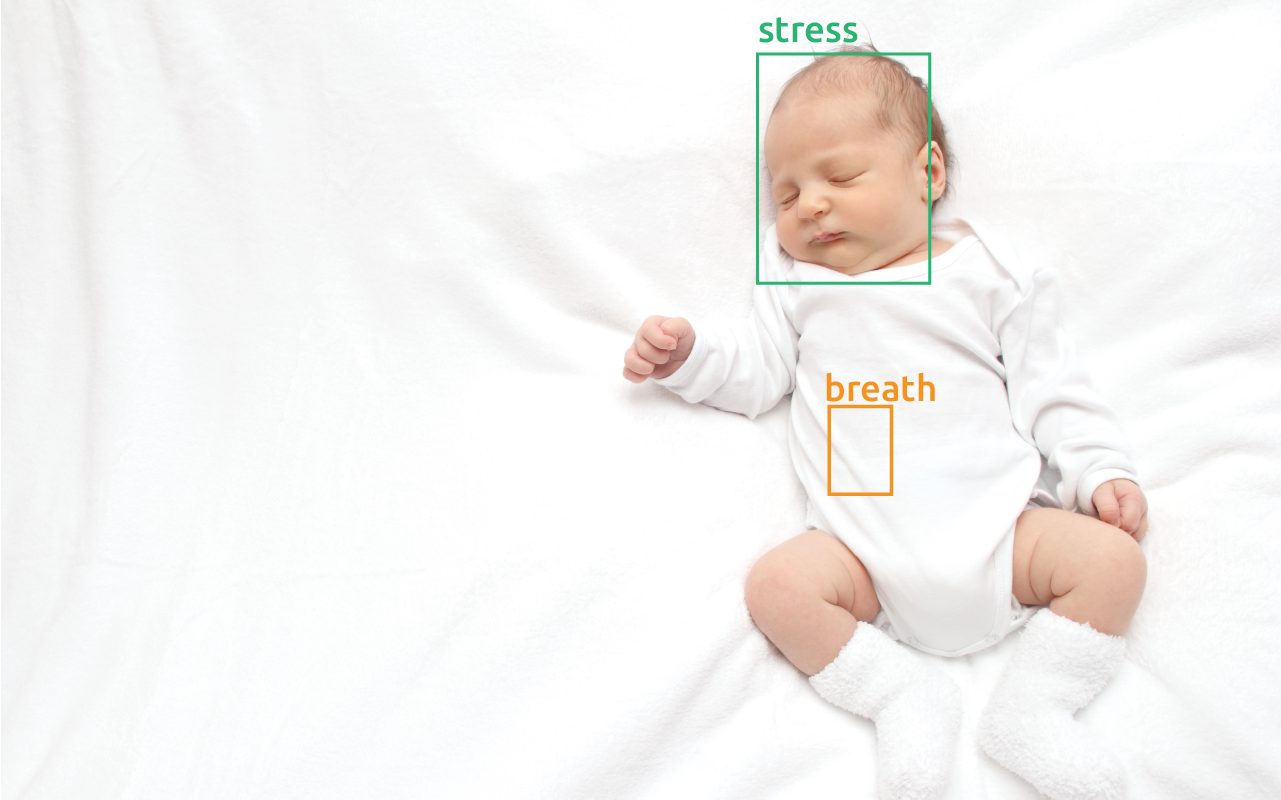
- 板载AI功能:实时3D检测、特征追踪、OCR、人脸识别、边缘检测、人体骨骼、语义分割等
- 支持的平台和语言:Windows10、Ubuntu、树莓派、linux、macOS、Jetson、Python、C++、ROS、Android(需depthai≥2.16.0)。
- 支持的框架和神经网络:OpenVINO、Kaldi、Caffe、ONNX、MXNe、TensorFlow、Pytorch、MobileNetv2SSD、Deeplabv3+、YOLOv3/v4/v5等等。
应用场景
- 工业智能化/自动化
- 机器人、无人机
- 安防监控
- 智能驾驶
- 医疗大健康
- 编程教育




包装内容
- 一台OAK-D-CM4-PoE相机
- 一根两米网线
技术参数
镜头参数
| 参数 | RGB相机 | 双目相机 |
|---|---|---|
| 图像传感器(Sensor) | IMX378 | OV9282 |
| DFOV / HFOV / VFOV | 78°D / 66°H / 54°V | 89° D/ 80° H/ 55°V |
| 分辨率 | 12MP (4032×3040) | 1MP (1280×800) |
| 最大帧率 | 60 FPS | 120 FPS |
| 焦距(EFL) | 4.81mm | 2.35mm |
| 光圈(F.NO) | 1.8 ±5% | 2.0 ±5% |
| 对焦范围 |
AF:8cm – ∞ FF:50cm – ∞ |
FF:19.6cm – ∞ |
| 镜头尺寸 | 1/2.3” | 1/4” |
| 像素大小 | 1.55µm x 1.55µm | 3µm x3µm |
| 快门 | 卷帘快门 | 全局快门 |
RVC2性能
RVC2是Robotics Vision Core 2的缩写,也是OAK相机的核心。
- 4TOPS算力(4T用于AI)。
- 能运行任何AI模型,甚至自定义训练的模型(需将模型转换为blob格式)。
- 编码:264、h.265、mjpeg编码, 4k/30fps, 1080p/60fps。
- 计算机视觉:通过ImageManip节点进行翘曲/扭曲、调整大小、裁剪、边缘检测、特征跟踪。你也可以运行自定义的CV功能。
- 立体深度感知:具有过滤、后处理、RGB-深度对齐和高可配置性。
- 物体追踪:通过ObjectTracker节点进行2D和3D追踪。
深度感知
- 双目深度传感器基线:9厘米(即左右相机之间的距离)。最小和最大的深度感知取决于相机的FOV、分辨率和基线,更多信息请查看这里。
- 推荐测距范围:0.85~10m。最小深度:~20cm(400P,扩展),~40cm(400P或800P,扩展),~80cm(800P)。
其他参数
- 接口:PoE
- 功耗:2W~5.5W
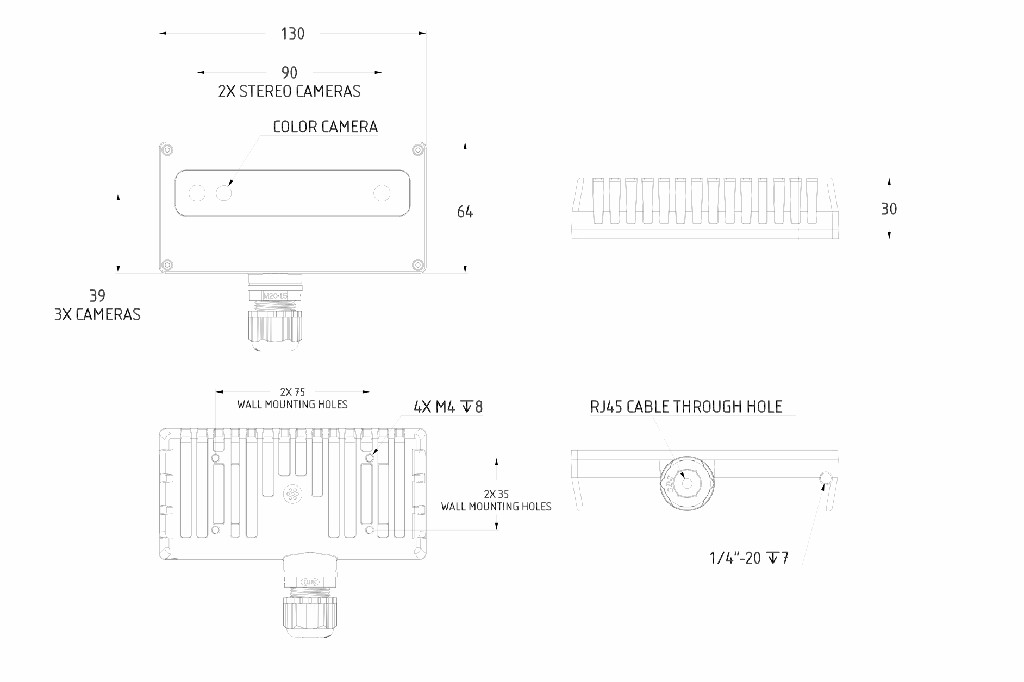
- 尺寸:130×64×30mm
- 重量:318g
- 电路板型号:DM2097
- 工作温度:-20度~60度
- IMU:BNO086(查看参数)




{kind=link}
{kind=link}