OAK-D-CM4上手指南
上手体验
- 快捷,开箱即用。不需要从GitHub上获取代码。也不用担心环境不会配置。
- 方便,所有的东西都集成在OAK-D-CM4上。
基础介绍
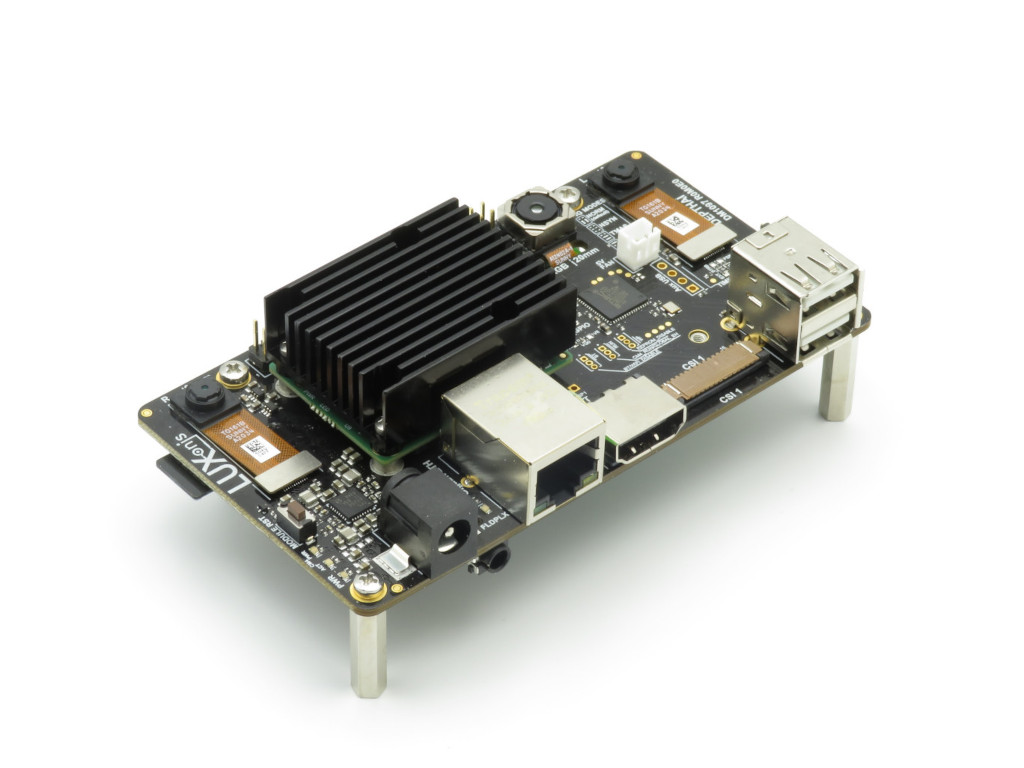
- OAK-D-CM4是基于OAK-D和树莓派PI CM4IO板。它将主机和Luxonis Depthai SoM相结合。为实现实时Spatial AI提供了完全集成的解决方案。
- 具有千兆以太网,并配备了支持POE的MagJack。
主要功能
- 支持机载RGB和双目相机模块。
- 连接无线网络,4GB RAM, 8GB 存储。
- USB2.0接口连接CM4与Depthai SoM。
- 5V PWR 输入。
- 直连千兆以太网。
- 支持树莓派CSI、DSI。
- 支持树莓派USB引导选项。
- 支持TRS音频输出。
- 支持SD卡。
- CMIO/CM4 的标准 40 针头
系统环境
不需要插入SD卡,OAK-D-CM4自带树莓派系统,拥有8G存储。
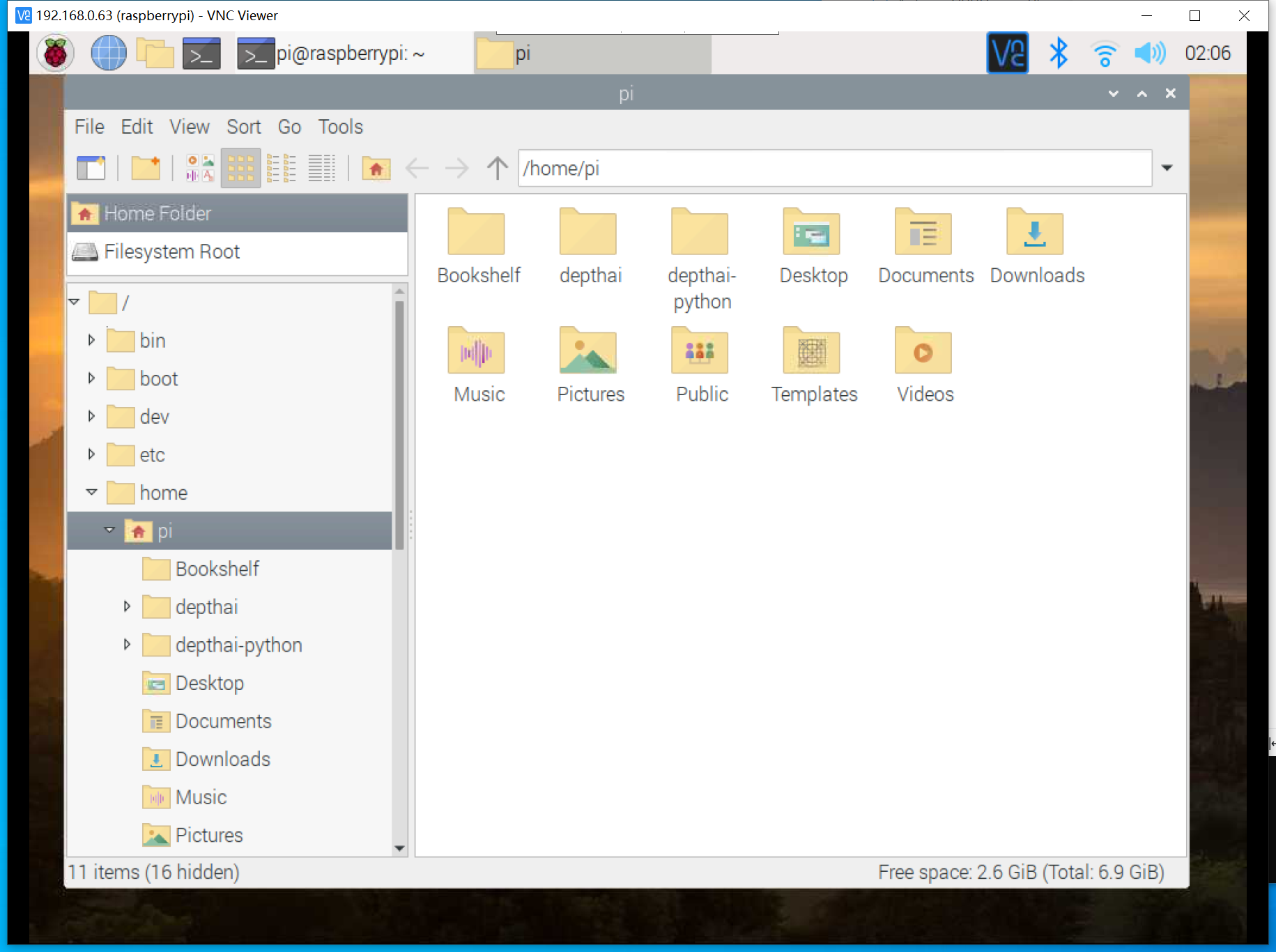
进入系统中,可以看到官方已经为我们集成了depthai和depthai-python。这样就不需要我们从GitHub上手动拉取了。
打开命令行输入以下命令:
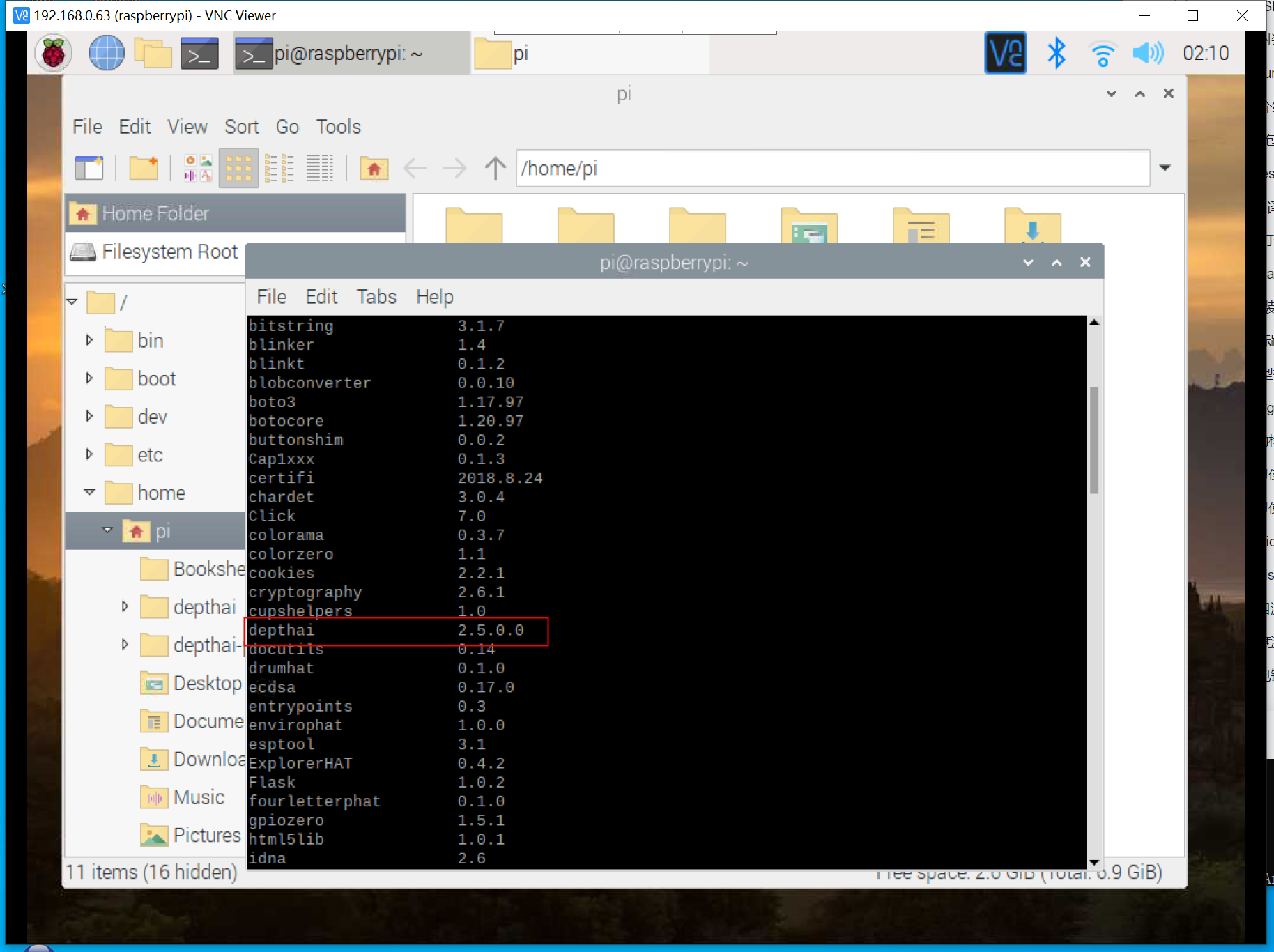
python3 -m pip list可以看到,官方贴心的帮我们安装好了depthai python库。

直接运行
cd depthai
python3 depthai_demo.py 更新depthai版本
由于OAK-D-CM4预装的depthai是2.5.0.0,在上图中我们可以看到X,Y,Z数据全部没有正确显示出来。我们只需要将示例库和depthai python库更新到最新版本就可以正常显示了。
首先进入depthai文件。从GitHub上拉取最新提交:
git pull接下来安装依赖
python3 install_requirements.py最后就可以重新运行depthai_demo.py
python3 depthai_demo.py更新报错
如果出现报错:unable to access ‘https://github.com/luxonis/depthai.git/‘: Could not resolve host: github.com可以执行:
git config --global --unset http.proxy
git config --global --unset https.proxy运行demo时出现:ImportError: numpy.core.multiarray failed to import错误
python3 -m pip install -U numpy如果出现没有找到设备的错误:添加udev规则
echo 'SUBSYSTEM=="usb", ATTRS{idVendor}=="03e7", MODE="0666"' | sudo tee /etc/udev/rules.d/80-movidius.rules
sudo udevadm control --reload-rules && sudo udevadm trigger如果出现某一相机不出图,或报出检测不到相机的Error,请检查相机是否插好。
树莓派新手指南
如果你刚开始接触树莓派,可以看看下面这篇新手教程:
http://ruanyifeng.com/blog/2017/06/raspberry-pi-tutorial.html
OAK-D-CM4设备刷写镜像(Windows&Linux)
如果你的设备开不了机,需要刷写镜像,可参照此处的教程操作。