DepthAI v3 目标追踪器:速度估计与遮挡处理
在真实场景中实现可靠的实时目标追踪一直是一项挑战,尤其当目标互相遮挡、暂时隐匿于障碍物后方,或是在密集环境中移动时。
随着最新 DepthAI v3 对目标追踪器的升级,追踪能力变得更加稳定且具备更强空间感知能力,新增目标速度估计功能,同时优化了遮挡处理能力。
最终效果:目标 ID 保持更稳定、追踪轨迹更平滑,为机器人、自动化及 AI 视觉应用提供更丰富的空间感知能力。
目标速度估计
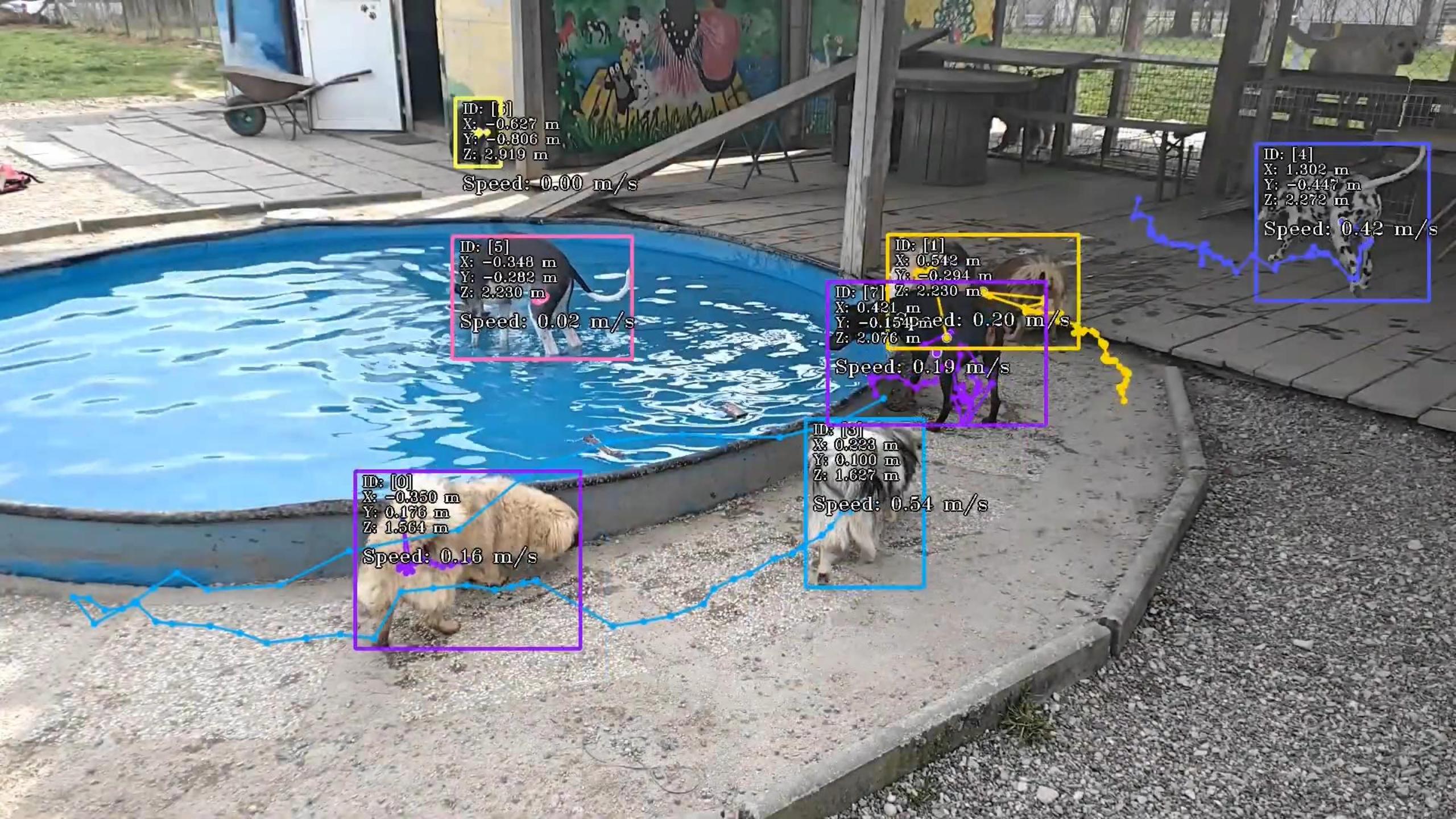
当使用空间检测网络(SpatialDetectionNetwork)的检测输出时,追踪轨迹(tracklet)会自动包含空间坐标X/Y/Z(单位:毫米)。
在此基础上,追踪器可额外输出目标三维运动速度与速率(单位:米 / 秒)。
使得应用不仅能检测、追踪目标,还能精准获取目标的运动速度与行进方向。
无论是机器人系统、仓储自动化、智能交通还是自主移动设备,直接从追踪器获取速度信息,可大幅简化上层业务逻辑开发。
针对遮挡场景增强的空间感知关联
本次更新最大改进之一是增强的空间感知关联。
传统目标追踪器主要依靠 2D 图像 IoU 重叠匹配。当目标路径交叉、发生局部遮挡,追踪 ID 极易跳变、稳定性大幅下降。
更新后的追踪器可在关联阶段选择性融合深度数据与真实世界三维坐标,以 3D 空间位置作为匹配依据,而非仅依赖 2D 图像重叠度。在目标部分遮挡、画面重叠场景下,追踪稳定性显著提升。
适用场景:
- 人员物体密集场景
- 运动目标路径交叉
- 目标局部遮挡
- 高速运动目标追踪
空间关联默认关闭,在深度数据可靠时可通过代码开启:
objectTracker.setSpatialAssociation(True)
同时提供精细化调优参数,可根据业务需求平衡图像域追踪与三维空间一致性权重。
轻量高效 边缘实时运行
更新后的追踪器针对在边缘设备上实时部署进行了高度优化SHORT_TERM_IMAGELESS 仅依靠bounding box位置和大小,持续性地提供轻量且高效的追踪,不依赖目标外观颜色特征。
非常适合算力受限、高实时性要求的机器人与嵌入式 AI 视觉项目。
DepthAI 管道中的简单集成
将目标跟踪器添加到管道中仍然很简单:
with dai.Pipeline() as pipeline:
objectTracker = pipeline.create(dai.node.ObjectTracker)DepthAI v3 中,追踪轨迹新增坐标变换元数据,便于实现 RGB、深度等多流之间 ROI 区域映射与对齐。
了解更多
此次更新是 DepthAI 空间 AI 管线(Pipeline)能力持续改进的一部分。
如果你想更深入地了解配置选项、追踪器类型、空间关联调优和实现细节,可以查看官方文档:
https://docs.luxonis.com/software-v3/depthai/depthai-components/nodes/object_tracker