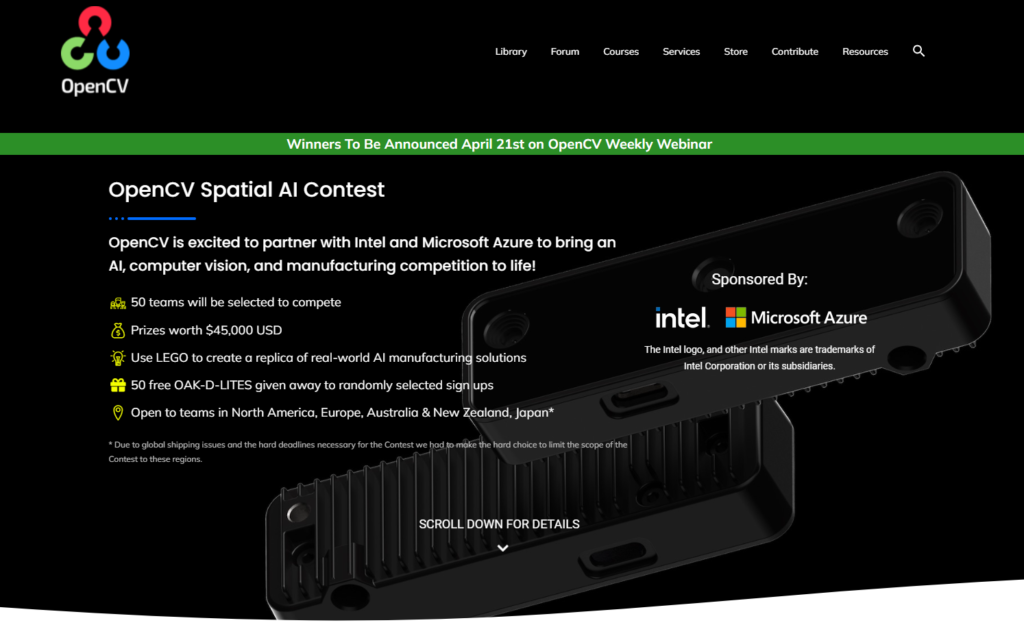
OpenCV Spatial AI决赛项目:自动垃圾回收机器人
2022年OpenCV AI竞赛目前已经到了决赛阶段,最终的获奖名单将会在4月21日公布。
我们会不定期介绍大赛的项目,本期介绍其中一个进入决赛的项目。
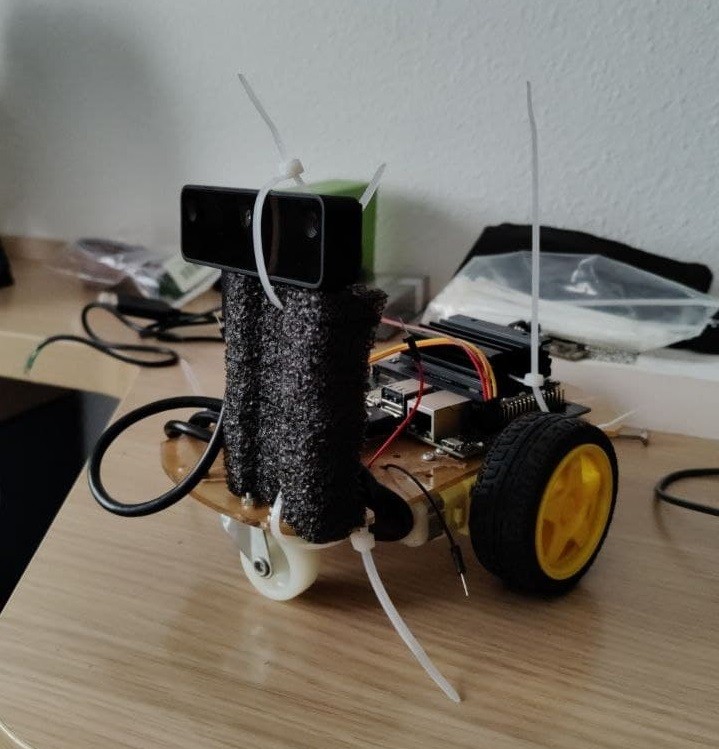
团队成员Lorenzo Rondán表示,他们最开始的项目原型是一个机器小车,有两个由NVIDIA Jetson Nano控制的伺服电机和一个Adafruit电机驱动器。
原型机最开始长这样:
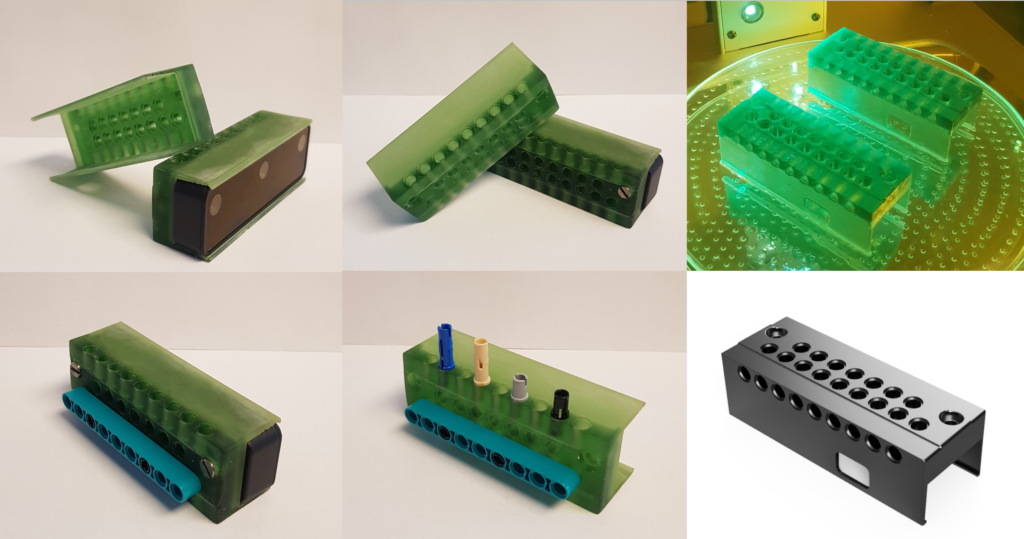
今年的竞赛与往年相比,不同之处在于今年的主题是要用OAK-D-Lite相机和乐高来解现实世界中的问题。首先参赛者需要一个乐高转接板,能让Lite安装到乐高上。

幸运的是,参赛者Adam制作了这个转接板,并分享了这个3D打印模型。现在,你可以在OAK中国官网对应的产品页面找到这个模型的下载地址。

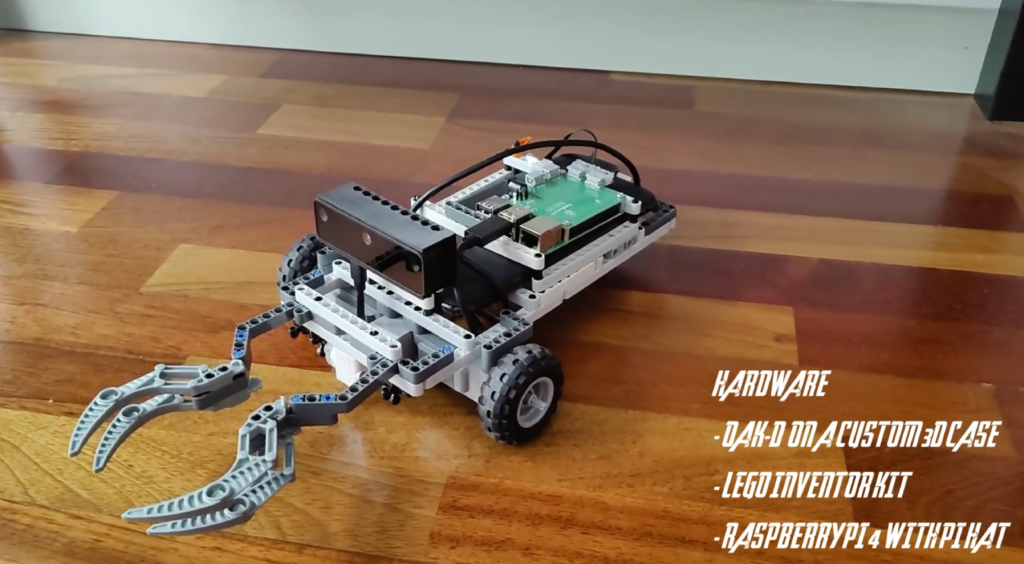
考虑到项目提案,机器人最终的样子如下图,加了能够抓取物体的机械爪。
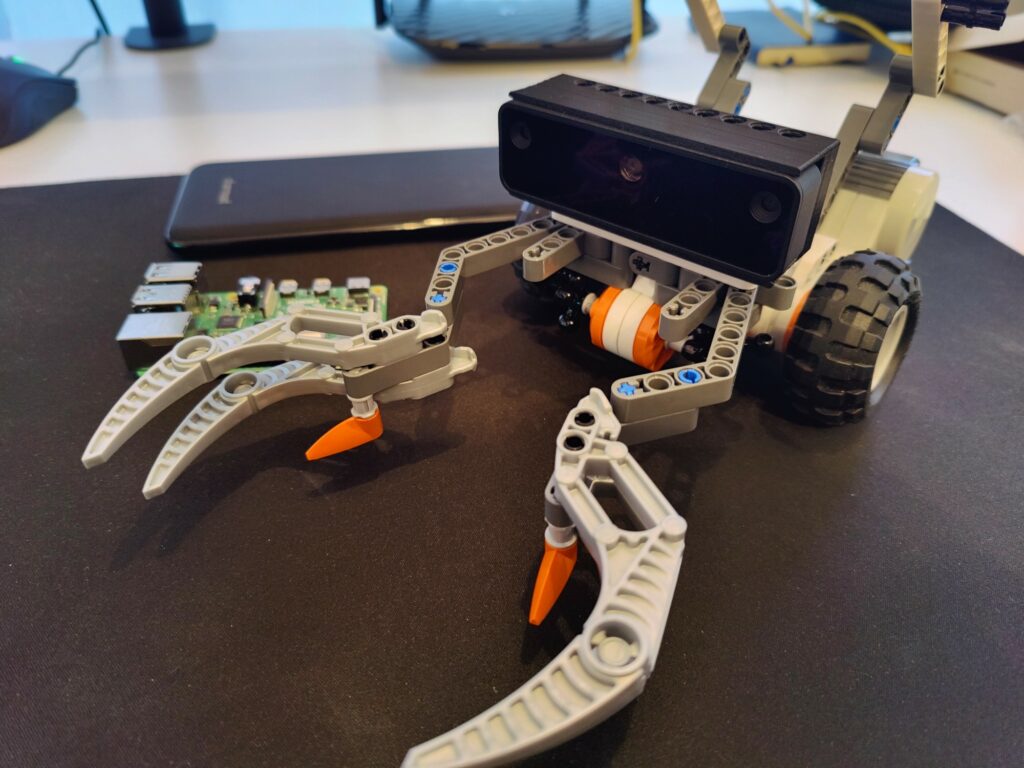
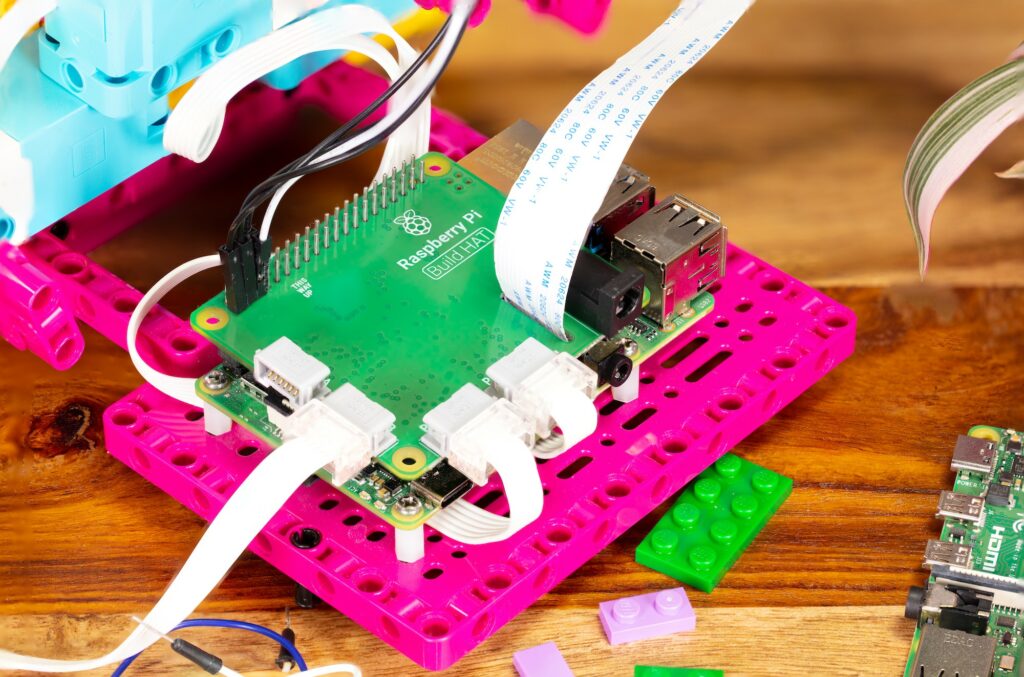
在硬件上,除了lite相机和乐高,他们还加了树莓派HAT。
在模型训练上,Guadalquivir Titans表示他们已经找到几个关于垃圾类型检测和分类的数据集,会用来训练用在Lite上的计算机视觉模型。
团队:Guadalquivir Titans
资料来源:Lorenzo Rondán Domínguez