使用OAK-D双目深度相机为turtlebot3小型移动机器人添加视觉系统

| 来源:medium 翻译:OAK中国 |
在我的上篇博客中,我试图用雷达来增强我的turtlebot3机器人。不过,我认为如果在机器人上安装一个摄像头,甚至更好的深度摄像头,我就可以利用点云和深度算法做路径规划、SLAM、自主导航等。鉴于此,我决定集成一个具有深度功能的简单深度摄像头。3D摄像头有很多选择,但对于小型机器人来说,它们可能非常昂贵(如zed和realsense)或笨重(如kinect v2),而我要求尽量简单和便宜。我最终选择了OAK-D,因为它的尺寸、价格和内置处理能力都很不错。
将硬件安装到机器人上
首先要做的是弄清楚如何将摄像头安装到我的 turtlebot3 burger上。因为我不想移除激光雷达,因此将其移至原始位置上方 5 厘米处,并将OAK-D放在前面,这样我就可以同时拥有两个传感器!

在ROS上运行
虽然安装需要一些时间,但这并不是过程中最困难的部分。下一步是修改机器人描述,以包括OAK-D传感器和激光雷达。这是 turtlebot3 burger的增强版的可视化。
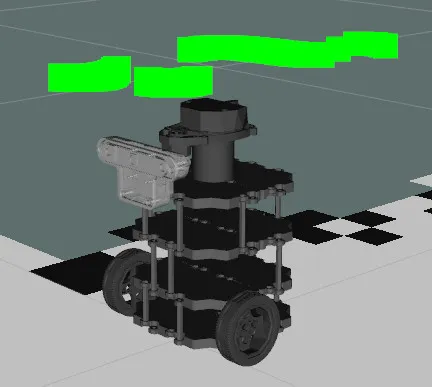
现在让我们看看 rviz 中OAK-D生成的 3D 点云。
输出看起来很棒!但是,我只是叠加彩色图像和深度图像以生成输出。尽管如此,这为 turtlebot3 burger 打开了大门,可以开始使用 OAK-D 添加的处理进行一些有趣的 3D 点云实验和深度学习!(官方使用案例)