OAK相机人工智能套件-南京派驰电子
使用由Luxonis设计和开发的OAK-D-Pro空间AI相机(OpenCV AI Kit with Depth Pro),开发一个高质量的深度估计项目。
主办方:
OpenCV基金会
传统深度估计是通过双目相机来完成的,而近些年使用神经网络(NN)的深度估计算法取得了巨大的进展!
一些算法使用单一图像来估计深度(单目深度),另一些使用神经网络来改善使用双目相机估计的深度,还有一些使用RGBD相机来改善深度估计。
本次大赛旨用OAK-D-Pro相机在开发一个高质量的深度估计,这个相机是由我们的合作伙伴Luxonis设计和开发的。
OAK-D-Pro使用主动光双目进行深度估计,尽管也有独立研究人员使用所有三个摄像头来改善结果。我们的目标是通过结合传统的计算机视觉技术和现代深度学习方法,使用神经网络来改善该设备的深度估计。你可以在OAK-D-Pro上使用一个、两个或全部的三个摄像头。
OAK-D-Pro使用文档完善的Python API,称为DepthAI API。参赛者还可以在Luxonis Discord频道上提问。(中国区参赛者可联系OAK中国提供技术支持)
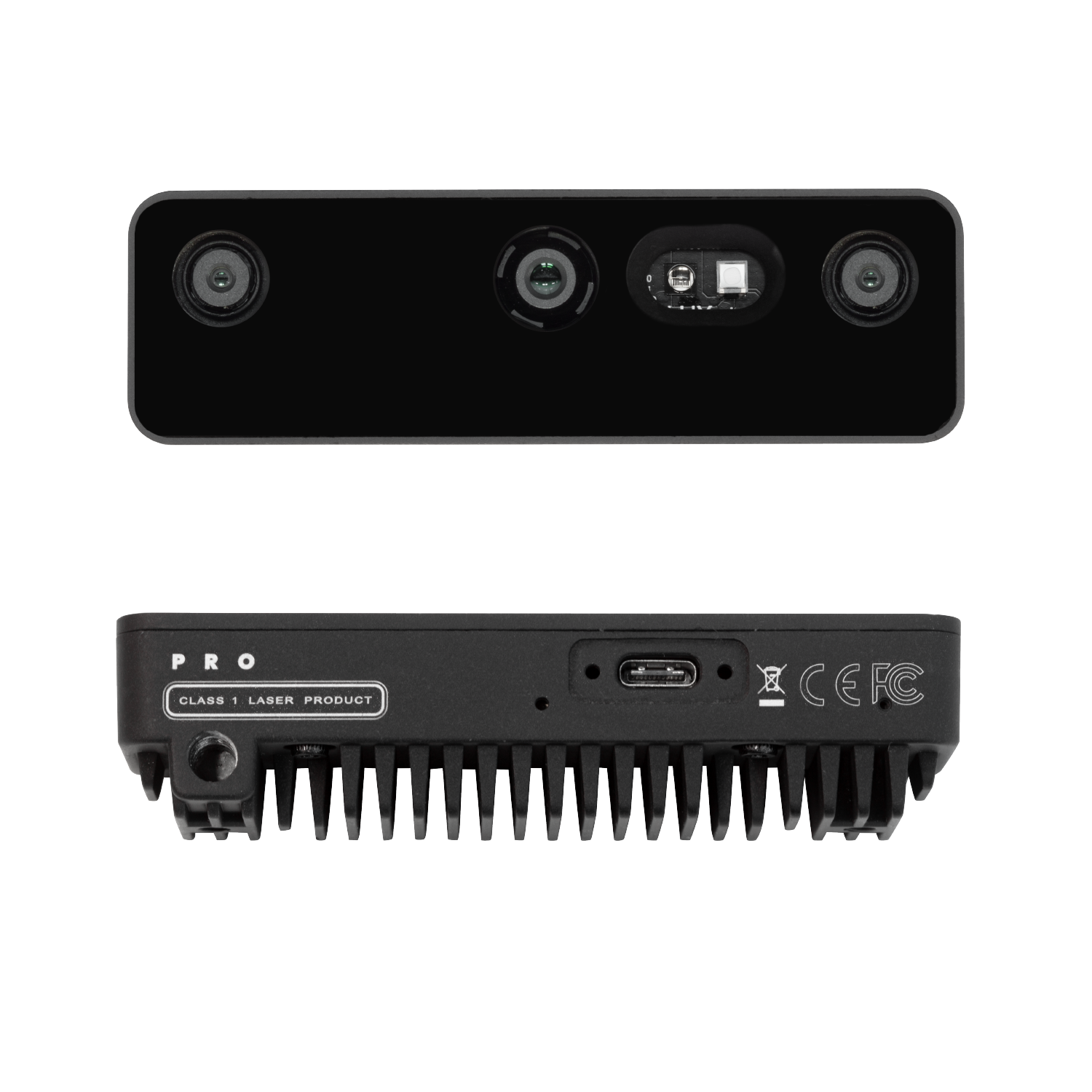
OAK-D-Pro由一对双目摄像头、一个RGB摄像头,激光点阵发射器组成。此外,它有一个英特尔Myriad X处理器,拥有4TOPS的算力(1.4TOPS用于AI)。OAK-D-Pro可以被认为是一个带有强大NN处理器的RGBD相机,可用于改善深度估计。
本次大赛有两个阶段:预赛和决赛。
预赛提交表格:查看
预赛参赛者需在2022年10月31日之前提交一份包含以下内容的方案:
1.团队
a.团队名称,让参赛充满趣味。
b.团队简介,每个团队成员最多四名,我们也建议用GitHub的链接来展示你的工作。
2.提案
a.细节。提供你计划使用什么算法的细节,可以提交你计划尝试的多个想法。
b.背景。展示出你对该领域现有的研究背景将提高获奖概率,所以我们建议你提供充分的参考资料。
我们将会根据提交的提案选出25名进入决赛的团队,每个团队将在公告发布后15天内将会收到一个OAK-D-Pro。
届时,我们将会发布一个测试算法的场景清单。
进入决赛的团队需在2022年12月18日之前提交一份包含以下内容的最终方案:
1.代码
80%的打分将参考代码、模型,请在代码中说明如何在OAK-D-Pro上运行它。
a.以15 fps或更快速度运行的代码将仅以质量为评判标准。
b.对于运行速度低于15 fps的代码,将进行处罚。这意味着,较慢的代码需要产生非常好的结果才能获胜。
2.视频
剩余20%的打分将参考用于解释项目的视频(约5分钟),请在视频中展示演示。
被选入决赛的前25个团队将获得OAK-D-Pro。
前三名获胜团队将分别获得5千美元、3千美元和2千美元的现金奖励。
这条赛道是围绕改进OAK-D-Pro的深度估计而展开的。(中国地区参赛者可在此处了解更多产品详情)
激光点阵发射器在OAK设备前面投射许多小点,这有助于匹配视差,特别是对于低视觉特征的表面(几乎没有纹理的空白表面),如墙壁或地板。我们使用的技术被称为ASV(active stereo vision)——主动双目立体视觉,因为在OAK-D-Pro上进行立体匹配的方式与在OAK-D上一样(被动双目立体视觉)。
目录