DepthAI ROS Release 3.0
大家好!
OAK现已推出了新版本的 DepthAI ROS软件包,专为 ROS 2 Kilted 构建并使用 DepthAI V3。
关键更新
- DepthAI 库 V3 集成
底层 DepthAI 库已更新至 V3,带来了许多新功能和BUG修复。有关详细信息,请参阅 depthai-core 库。
- RVC4 支持
这是第一个支持 OAK4 设备(OAK 4 D 和 OAK 4 S)的版本
- 重新命名的节点和参数
在depthai_ros_driver 的主要node现在修改为driver(之前是camera),用户应该升级yaml配置以体现这个改动。
camera.launch.py已经被弃用,取而代之的是driver.launch.py.
i_mx_id 已经被i_device_id所取代;
- 简化的神经网络创建
创建神经网络的过程在.depthai_examples和 depthai_ros_driver中都得到了简化。
i_nn_family 现在和i_nn_kind相对应(注意:未来这个参数可能会被重命名)
i_nn_model用于传递实际的神经网络模型。
新特性和功能
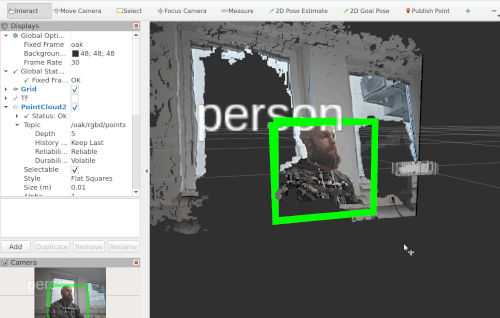
- 改进的 RGBD 和点云功能
添加了专用的RGBD 节点和点云转换器,用于生成性能显着提高的彩色点云。
RGBD 节点现在可用于发布 RGBD 点云,无需外部节点并提高性能。
- 用于增强流控制的摄像机节点
Mono/Color camera节点已被更通用的节点所取代。
这允许请求未失真的流,并指定准确的宽度和高度,而无需担心 ISP 缩放问题。
可通过设置和选择i_resize_mode,来请求未失真的流。
默认相机输出大小现在为 640×400,以获得更好的性能。
IMU现在以RDF帧发布:IMU 数据现在在 RDF 帧中一致地发布:Camerai_undistorted
- 默认情况下的TFPublisher
系统现在默认使用 TFPublisher 而不是 URDF 描述,以获得更准确的结果。
- 主机节点
现在可以将主机节点集成到管道中以提高性能。
- 独立的立体视觉FPS
该节点现在具有独立的FPS参数,与传感器FPS分开。
实验性的 – 新的 VIO 节点 – 基于开源库 (基础的),目前在主机上运行 RVC2 设备(RVC4 支持即将推出!),发布位置和里程计信息
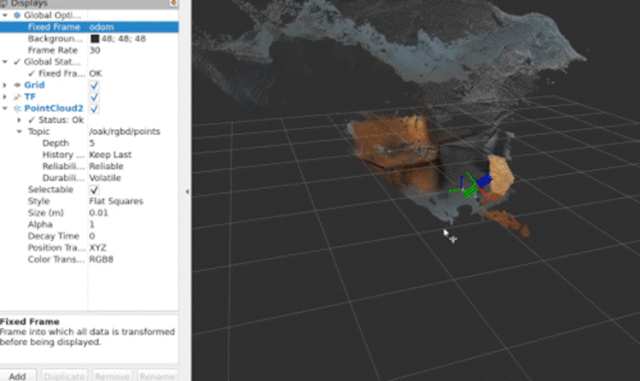
我们还计划很快发布一个基于开源 RTABMap 库的VSLAM 节点!(它目前在 C++ 和 Python 实现的基本depthai-core 库上可用)Stereo
改进和优化
- 更新的 Socket/Frame 命名
Socket和Frame命名约定已更新,以准确反映不同的设备和配置。在rs_mode中,名称与Realsense一致,而特定设备(例如OAK-D-SR-PoE)使用特定于传感器的名称(例如 tof 而不是 rgb)。
- 简化的depthai_examples
depthai_examples 存储库已经过广泛修改,以删除已弃用的示例并简化现有代码。当前的示例包括:

- 管道创建的参数更改
与管道创建相关的参数已移至 PipelineGen PH,包括:
i_pipeline_type
i_nn_type
i_enable_rgbd
- Rviz 和 TF Frame更新
新的 Rviz 配置已被添加到一些示例中。base_frame 和parent_frame的TF Frames 已被分别调整为 NodeName 和 oak_parent_frame。有关完整的更新日志,您可以参考此链接。
如何获得:请根据我们官方文档查找说明操作
注意一些已知问题
- 分割神经网络、VIO 和 SLAM 目前仅适用于 RVC2 设备。
- 要使用 NNs,您需要互联网连接(用于模型下载)
- 对于 RVC4 设备,您只能将 COPY 用作 ImuSyncMethod。
- 尚不支持设置图像方向。
- 并非depthai_filters中的所有示例都可以正常工作。
- RGBD 节点尚无 GPU支持。
- 尚不支持使用外部话题作为驱动程序的输入