全新的ToF滤波:深度感知和点云的重大提升
大家好!
今天,我们很高兴地宣布我们为OAK-D-SR-PoE相机推出一套新的滤波。这些滤波极大地改善了原始ToF深度感知,降低了噪声,稳定了测量结果,并产生了更清晰的点云(PCLs)。
开箱即用,ToF提供强大的深度感测,但原始数据可能会有噪点、闪烁或不完整。有了我们的全新滤波系统,ToF现在可以提供更清晰、更稳定、对现实世界任务更有用的深度图和点云。
无论您是使用机器人、自动化还是消费设备,这都意味着ToF将成为立体视觉上遇到困难时最有力替代选择。
🚀为何滤波如此重要?
原始ToF深度数据具有令人难以置信的潜力,但如果不进行处理,就会变得混乱。新的滤波管道通过以下方式改变了这一点:
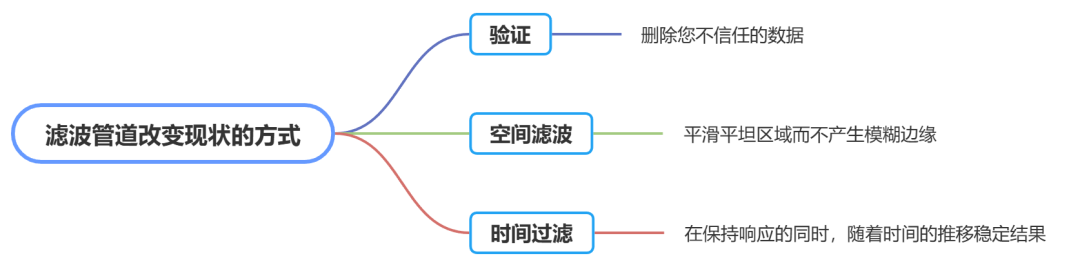
简而言之,这些滤波接收原始深度输入,并将其转化为稳定、可用的数据。这些改进在点云中尤为明显,以前噪点较多或不完整的曲面现在看起来更加干净连续。
更好的是:过滤器可以针对特定应用进行调整,因此无论您是需要近距离的细节还是远距离的稳定性,都可以调整平衡。
➰每个范围的预设
为了更容易地使用,我们为最常见的场景创建了预设参数。无需无休止地调整——只需选择适合您用例的选项:
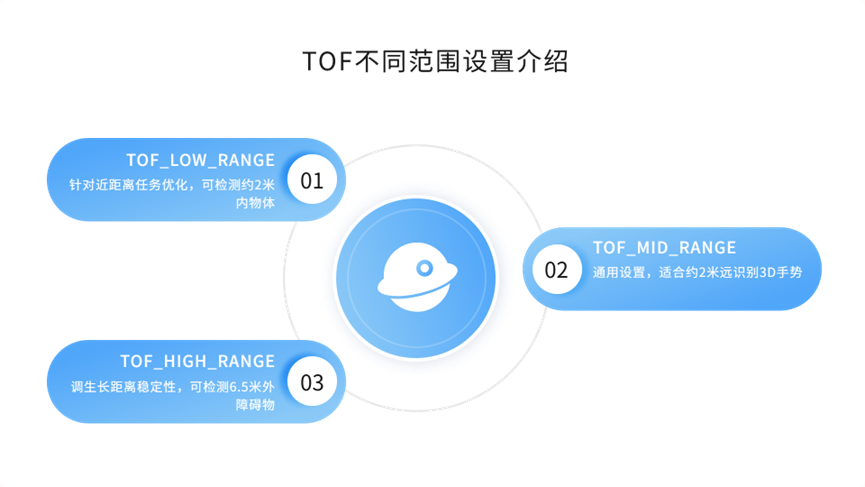
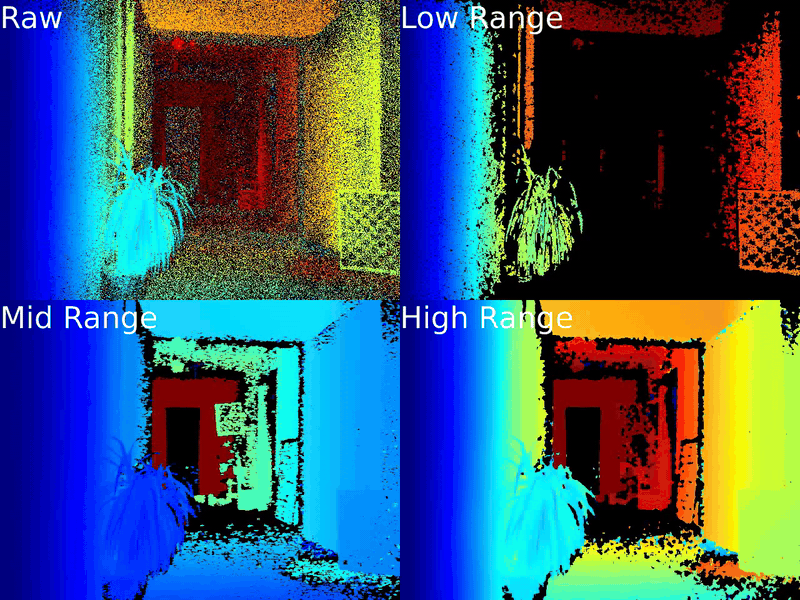
每个预设都以不同的方式平衡降噪、边缘保持和稳定性。例如,低范围预设可最大限度地减少边缘模糊,而高范围预设则侧重于跨距离的平滑和一致性。
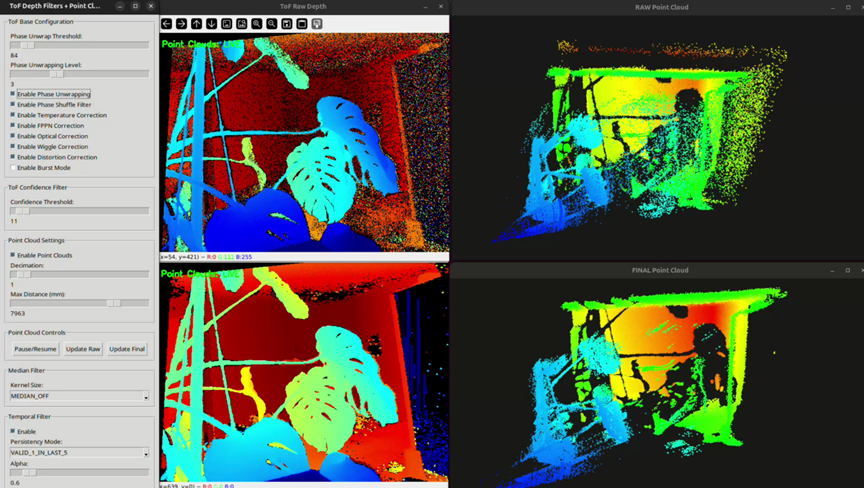
💻 尝试自定义筛选值
如您想要超越预设参数,尝试自己的滤波设置,您可以通过运行我们的示例项目进行尝试:
git clone https://github.com/luxonis/oak-examples.git
cd oak-examples/
python3 -m venv venv # for Linux
source venv/bin/activate # for Linux
cd depth-measurement/3d-measurement/tof-pointcloud/
pip install -r requirements.txt
python3 main.py这将启动ToF点云演示,您可以在其中直接调整验证、空间和时间滤波,并实时查看它们对结果的影响。这是了解每个滤波如何发挥自身作用,以及为自己的应用程序进行微调的好方法。
为了显示差异,我们准备了三个简单但现实经常遇到的例子

通过这些预设,您可以快速将ToF下放到实际应用程序中,并立即看到效果。
📦 Notes
1、在RVC2上,这些新滤波当前在主机上运行。
2、在RVC4上,OAK尚未推出ToF相机。
3、滤波显著地改善了结果,但它们无法在没有足够特征的地方创建于捕获信息——反射率非常低、距离极远或多径反射严重的场景仍然具有挑战性。
总结:随着这些新ToF滤波的发布,原始深度感知取得了巨大的进步。更清晰的地图、更平滑的点云和即插即用的预设使OAK-D-SR-PoE在各个行业中更容易使用!
